Atmospheric Corrosion Detection & Management with Artificial Intelligence
Eric L. Ferguson, Steve Potiris, Marco Castillo, Toby F. Dunne, and Suchet Bargoti
Atmospheric corrosion is the biggest asset integrity threat to offshore platforms. Manual inspection of topside equipment is labor-intensive, subjective, and provides incomplete asset coverage, increasing the risk of unplanned shutdowns. Computer Vision algorithms can be used to detect corrosion, enabling high-risk equipment to be targeted for remediation. This article covers the first-in-industry application of an artificial intelligence-based system to improve corrosion management and inspection processes. The system is deployed across a large offshore oil and gas (O&G) platform in the Gulf of Mexico, demonstrating greatly improved inspection and maintenance processes while reducing the operating costs and risks associated with offshore O&G platforms.
External corrosion on offshore oil and gas platforms is one of the biggest threats to asset integrity and its management is a large operational expense. Many operators now implement risk-based assessment programs where all equipment is assessed periodically with the aim of reducing operational costs while maintaining integrity. Regulatory codes for offshore platforms in the Gulf of Mexico (GoM) require a visual inspection of all pressure equipment and piping every five years. In practice, this can equate to approximately 20% of equipment being inspected per year on a large-sized offshore platform (i.e., a topside weight of around 10,000 tonnes), with a rolling five-year inspection plan to balance the inspection workload evenly through time. As a result, in a five-year inspection cycle, a platform operator will not have visibility to the condition of the equipment for other times in the inspection cycle (i.e., a single piece of equipment is only inspected once in the five-year cycle). Equipment and infrastructure layout can be complex, with equipment at-heights, spanning over water, or being in difficult to access areas. This can make inspections costly, time consuming, and yield varying quality of results. Variance across inspections can arise from the inspector’s subjectivity, the environmental changes, and the present working conditions around the platform. Inspectors must sometimes access equipment that is difficult to access or see, making close assessments difficult.
An effective asset integrity monitoring requires full visibility of asset and equipment conditions. Prioritizing non-destructive examination (NDE) on high consequence of failure or high likelihood-of-failure equipment results in effective risk reduction and improved fabric maintenance planning. For instance, high consequence-of-failure equipment (such as a high-pressure gas line) with severe corrosion must be addressed as soon as possible. Further, prioritization of a complementary painting/ remediation program is also critical to preventing assets reaching this level of deterioration in the future. By prioritizing the remediation of high-risk assets and optimizing the remediation process, the overall risk decreases significantly, and the cost of remediation and inspection continues to decrease with each re-inspection. At scale, this enables operators to reduce their assigned personnel on board (PoB) per platform.

The automatic detection of corrosion in images has been explored in recent literature. 1-9 Ortiz et al.2 demonstrated the effectiveness of using a single-layer artificial neural network for the detection of corrosion and cracks in ship ballast tanks. Hoang and Tran4 used a Support Vector Machine to classify small tiles of an image as containing rust or no rust. Petriccaet et al.3 and Nash et al.5 trained a Convolutional Neural Network (CNN) to classify an entire image as either containing rust or no rust, while Nash et al.6 estimated the required effort for attaining human-level accuracy for corrosion detection by a CNN to be >65,000 labeled images. Finally, Ferguson et al.,7 Majors et al.,8 and Garcia et al.9 leverage CNNs to classify pixels in an image (i.e., semantic segmentation) as either containing rust or not, giving a detailed understanding of the scene.

A case study is presented, where an artificial intelligence (AI)-based corrosion detection and management system (using a machine learning algorithm) is deployed across a large offshore O&G platform in the GoM. The impacts of this new technology for corrosion management are demonstrated, in practice. The case study demonstrates:
- The cost reduction of inspection programs when using the AI-based system vs. traditional manned visual inspections
- Increased inspection coverage when using the AI-based system vs. traditional manual visual inspections
- A decrease in the required PoB on an offshore platform required to conduct general visual inspections (GVIs)
- The reduction of risk across a platform through the prioritization of inspection and remediation
- The benefits associated with better prioritization and optimization of painting campaigns
- The benefits associated with the improved optimization of platform maintenance
Experimental Procedure
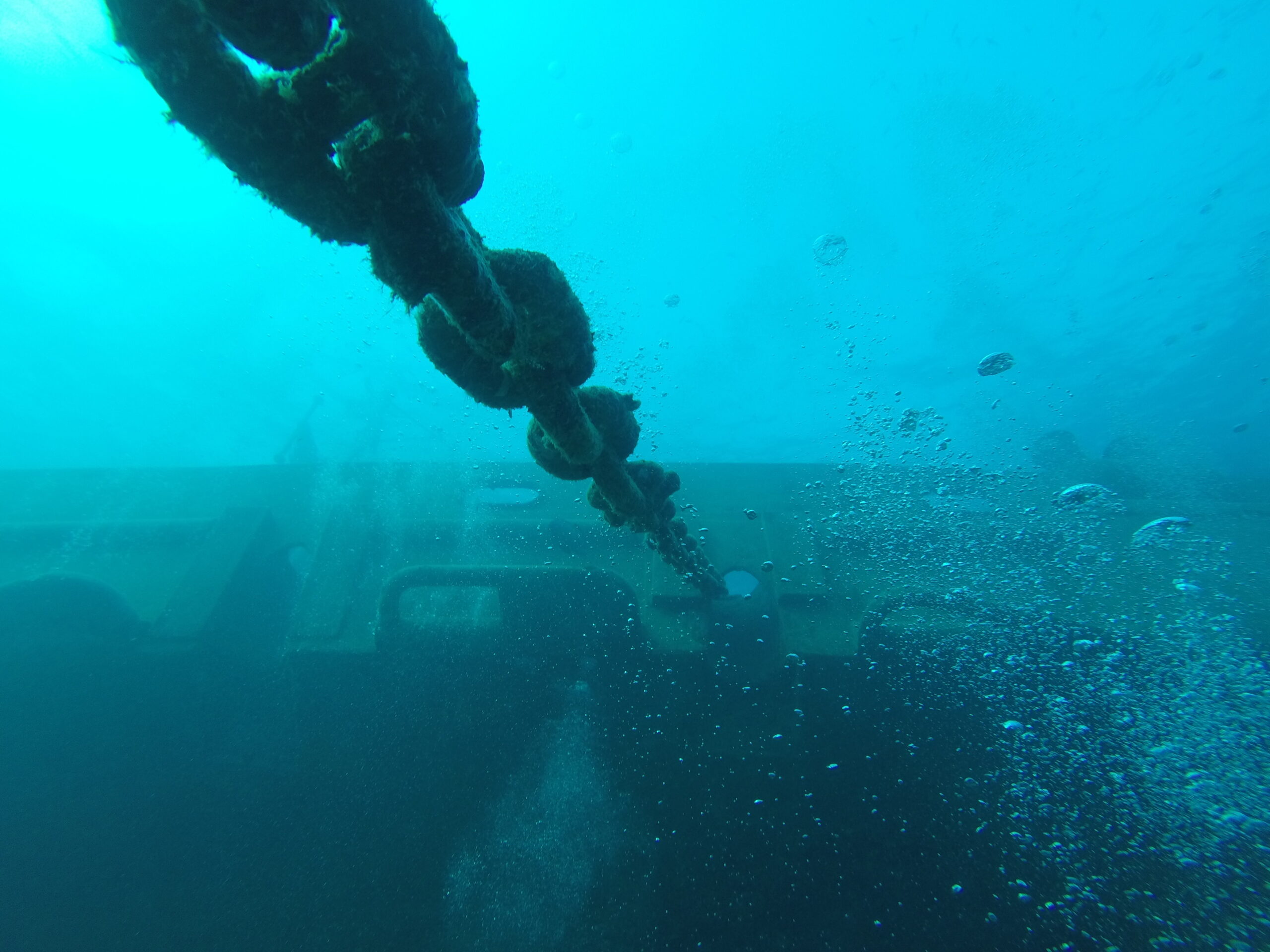
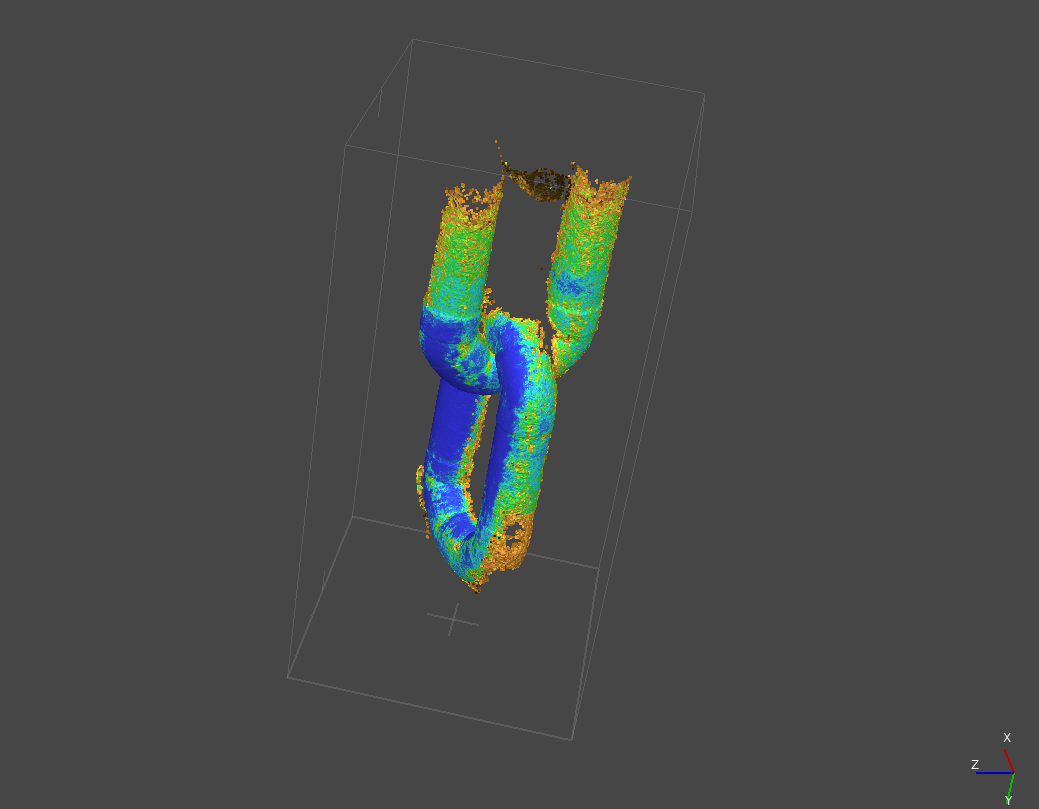
A terrestrial scanner is used to comprehensively capture inspection data (i.e., 360 degree panoramic images and laser scans) across the topside of an offshore platform. Scans are performed at locations approximately 2.5 m apart, over the entire platform. For a large deep-water spar production platform (approximately five 200 by 200 ft [61 by 61 m] decks), the scanning process requires nearly 14 days with five data scanning personnel. An example of a captured panorama is seen in Figure 1(a), while Figure 1(b) shows a 3D point-cloud representation of two decks of an offshore platform, made by combining a number of captured scans.
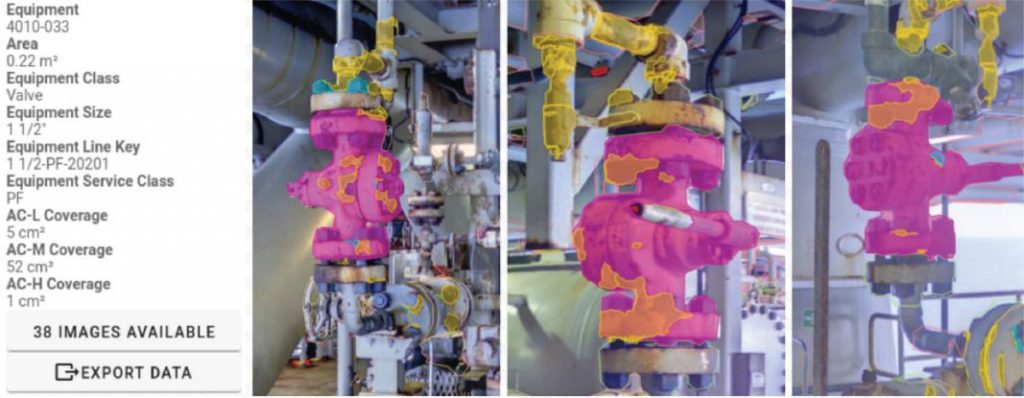
All inspection imagery is processed using automated corrosion detection algorithms, which localize and categorize corrosion across the facility by severity. Figure 2 shows an example of detected and classified corrosion, overlaid on inspection imagery, with atmospheric corrosion severity represented by color. A user can virtually walk through the inspection data, and be directed to equipment, such as equipment where heavy corrosion has been detected.
Due to the spacing of scans, equipment often appears in multiple views (i.e., it is common for equipment to be imaged from multiple angles and at various distances). Since all inspection imagery is spatially located within a common frame of reference, it is possible to combine the multiple inspection viewpoints and predictions together to produce a single, comprehensive 3D-visual dataset of the asset, as seen in Figure 3. Combining multiple views has many benefits. For example, if a portion of some equipment piece is obscured at a single scan location, it is often visible in neighboring scans. This process reduces the impact of camera obstructions and helps to maximize coverage of the equipment and the platform. Furthermore, corrosion predictions from multiple viewpoints can be merged via various statistical methods to further refine predictions and increase the accuracy of classification. Figure 3 shows aggregate corrosion metrics produced from three (of 38) separate views that have been statistically combined.
By associating captured imagery and with the corresponding laser data, it is possible to calculate the physical area, dimensions, and location of detected corrosion. Providing area measurements enables improved estimation of damage and prioritization of remediation for individual pieces of equipment.
Detected corrosion anomalies are registered to individual pieces of equipment, making it possible to quickly search and show the state of every item on the platform. Association of anomolies with equiment identities allows condition reports for all equipment on a platform to be provided by the operator. Individual objects can be queried and filtered ( for instance, by pipe diameter, pressure, piping class, and/or service designation). For example, the user can query all lines of the “highpressure gas” service type which have any severe atmospheric corrosion. These can be then scheduled for priority remediation. From the automatic detection of corrosion and coating condition in inspection imagery by the AI-based system, inspection workpacks are created to facilitate NDE and remediation of faults.
Results
An AI-based corrosion detection and management system is deployed across an offshore oil and gas platform located in the Gulf of Mexico. The offshore platform is a 10,000 tonnage semi-submersible, with 80,000 bbl per day production. The following case study demonstrates the value of corrosion detection and management with the AI-based system. It demonstrates the cost reduction of inspection programs when using the AI system vs. traditional manual visual inspections, the reduction of risk across a platform through the prioritization of inspection and remediation, the benefits associated with prioritization and optimization of painting campaigns, and benefits associated with the optimization of platform maintenance programs. A traditional manned GVI campaign is compared directly against the AI-based corrosion detection and management system.
The coverage of equipment across the platform, the number of production lines inspected, the approximate cost, and the number of personnel on-board the platform required to complete an inspection, are all compared. Similar performance of the AI-based corrosion detection and management system have been experienced on a number of platforms in the GoM.
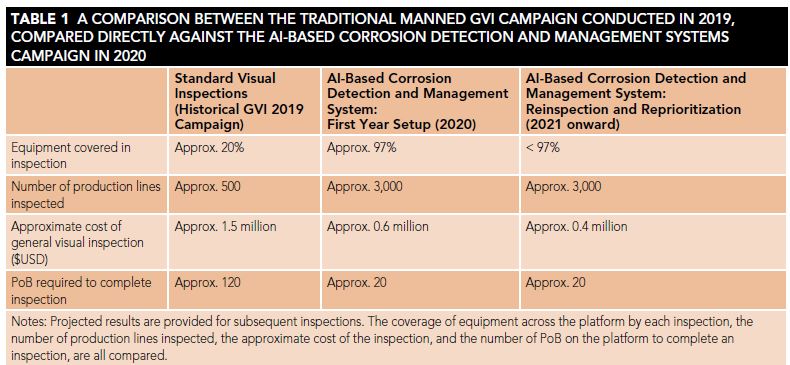
A direct comparison between inspection coverage from the AI-based corrosion detection/management system and inspection results from traditional inspections is provided. Approximately 75% of all equipment is covered by deck-level scans. Coverage is improved to approximately 97% through the capture of scans in positions that consider corner-cases such as tight spaces, complex pipework, and equipment at heights. In contrast, only 20% of equipment was covered in the 2019 GVI campaign. The AI system provided approximately 77% more coverage. Further, the full platform health assessment provided by the AI-system was $0.5M USD less than the proposed annual budget for traditional manned GVI. The direct recurring savings for each following year would be about $1M USD annually for the example platform. Further, the coverage of each AI-based inspection includes >97% of equipment, compared with about 20% coverage of the 2019 GVI campaign.
Inspection workpacks are created based on corrosion and coating degradation across the platform, as detected by the AI-based system. Workpacks are organized and prioritization schedules are provided, which enables optimization of remediation, follow up inspection, NDT, or replacement actions. Prioritization is achieved by automatically conducting a risk analysis for each piece of equipment and defect. Risk matrices and evaluations for each production asset are computed by comparing the severity of corrosion and coating degradation against the criticality of the equipment (e.g., a high-pressure gas line may have a high consequence of equipment failure, have severe corrosion detected, and should therefore have a high follow-up inspection or remediation priority). By prioritizing the remediation of corrosion and coating degradation based on the risk profile of equipment on which these defects are detected, asset integrity risk reduction across the entire facility is demonstrated.
The inspection outcomes of the AI-based corrosion detection and management system are summarized here:
- 83 nominations for “urgent equipment replacement”, where equipment has an estimated time-to-failure of 6 to 12 months
- 217 high-priority painting nominations, where if equipment is not painted then equipment will degrade to the point of requiring urgent equipment replacement within 12 to 24 months
The cost of equipment replacement for all 83 “urgent” items is approximately $15M USD. The total cost of failure for a single item of equipment ranges from $0.5M to $52M USD, based on the platform operators estimates. The detection of corrosion and subsequent “urgent replacement” of the equipment prioritized by the AI-based corrosion detection and management system represents a significant reduction in financial risk for facility operators.
For each of the 217 high-priority-forpainting lines, savings are approximately $100K to $250K USD, when compared against the cost of inaction. Based on operators’ estimates against the cost of “urgent replacement,” this equates to risk reduction of $21M to $55M USD. All “urgent equipment replacement” items were confirmed by the client as critical at the next planned shutdown of the platform. All nominated lines were targeted by maintenance crews for high-priority remediation, by the platform operators. The detection of coating degradation and subsequent prioritization of painting schedules by the AI-based corrosion detection and management system represents a significant reduction in financial risk for facility operators.

Conclusions
Manual offshore platform topside equipment inspection is costly, time-consuming, and labor-intensive. Moreover, inspection findings are subjective and provide incomplete asset coverage, leading to an increased risk of unplanned shutdowns due to missed repairs. Leveraging state-of-the-art machine learning algorithms to detect and classify corrosion across the entirety of a facility, along with contextualization through visual asset tagging, allows for the objective and comprehensive management of corrosion across all process equipment. This article showed this through a case study, where an AI-based corrosion detection and management system was deployed across a large offshore oil and gas platform, in the Gulf of Mexico, in 2020. The inspection outcomes by the AI-based system are compared against the traditional approach used by the operator in 2019. The AI-based system successfully detected corrosion and coating degradation across the platform and prioritized their remediation. The AI-based system provides greater inspection coverage; reduces the required number of personnel on board for general visual inspections; reduces the overall cost of inspections; reduces the risk of unplanned production downtime; and significantly reduces the financial risk associated with managing the offshore platform’s asset integrity.
References
1 E.L. Ferguson, et al., “Atmospheric Corrosion Detection and Management with AI,” 2022 AMPP Conference + Expo (Houston, TX: AMPP, 2022).
2 A. Ortiz, F. Bonnin-Pascual, E. Garcia- Fidalgo, J.P. Company, “Visual Inspection of Vessels by Means of a Micro-aerial Vehicle: An Artificial Neural Network Approach For Corrosion Detection,” Robot 2015: Second Iberian Robotics Conference (Springer, 2016) , pp. 223-234.
3 L. Petricca, et al., “Corrosion Detection Using AI: A Comparison of Standard Computer Vision Techniques and Deep Learning Model,” Proceedings of the Sixth International Conference on Computer Science, Engineering and Information Technology (2016), vol. 91, p. 99.
4 N. Hoang, V. Tran, “Image Processing-based Detection of Pipe Corrosion Using Texture Analysis and Metaheuristic-optimized Machine Learning Approach,” Computational Intelligence and Neuroscience (2019).
5 W.T. Nash, et al., “Automated Corrosion Detection Using Crowdsourced Training for Deep Learning,” Corrosion 76, 2 (2020): pp.135-141
6 W.T. Nash, et al., “Deep Learning AI for Corrosion Detection,” CORROSION 2019 (Houston, TX: NACE International, 2019).
7 E.L. Ferguson, et al., “Automatic Detection And Classification Of Corrosion With Convolutional Neural Networks,” Australasian Corrosion Assoc. Corrosion & Prevention 2020 (Perth, Australia: ACA, 2020).
8 M. Majors, et al., “Automated Corrosion Mapping AI & Machine Learning, Abu Dhabi Intl. Petroleum Exhib. & Conf. (ADIPEC, 2020).
9 R.L. Garcia, P.N. Happ, R.Q. Feitosa, “Large Scale Semantic Segmentation of Virtual Environments to Facilitate Corrosion Management,” Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLIII-B2-2021, 465-470, https://doi.org/10.5194/isprs-archives- XLIII-B2-2021-465-2021.
E. L. FERGUSON is the machine learning lead at Abyss Solutions Pty. Ltd., Houston, Texas, USA. He was awarded his PhD in electrical engineering from the University of Sydney in 2019 for his research contributing to the fields of machine learning and signal processing. He also has a B.Eng. and B.Sc. degrees.
S. POTIRIS is a robotics and AI subject matter expert at Abyss Solutions Pty. Ltd. He was awarded his PhD in 2020 where he specialized in building machine learning algorithms for largescale data processing in agriculture. He also has a B.Eng degree.
M. CASTILLO is a product manager at Abyss Solutions Pty. Ltd. He has worked broadly across upstream oil and gas. He is passionate about transforming the energy sector with state-of-the-art technologies and bringing them into the hands of operators. He has a B.Sc degree.
T.F. DUNNE is a senior software engineer at Abyss Solutions Pty. Ltd. He is a technology entrepreneur with over 15 years of experience in research and development, software engineering, image processing, spatial data analysis, and modeling. He has a B.Eng. degree.
S. BARGOTI is the chief technology officer of Abyss Solutions Pty. Ltd. He was awarded his PhD in 2016, where he specialized in building machine learning algorithms for large-scale data processing in order to develop intelligent information systems in agriculture. As CTO of Abyss Solutions, he has led the company toward fulfilling its mission: building intelligence that will drive all unmanned robots of the future. He has a B.Eng. and B.Sc. degrees.